どうもSTM32は、どのピンにでも機能を割り当てられるわけではなく、タイマ番号ごとにいくつか割り当てられるピンの種類が決まっていて、その中から選択するみたいです。しかもそのタイマも対照的にずらっと並んでいるのではなくそれぞれ個性があるみたいです。趣味的には楽しそうだけど学習コスト高そう…
まあ、とにかく見やすいところでLEDピンのPA5にPWM出力をしてみることにしました。
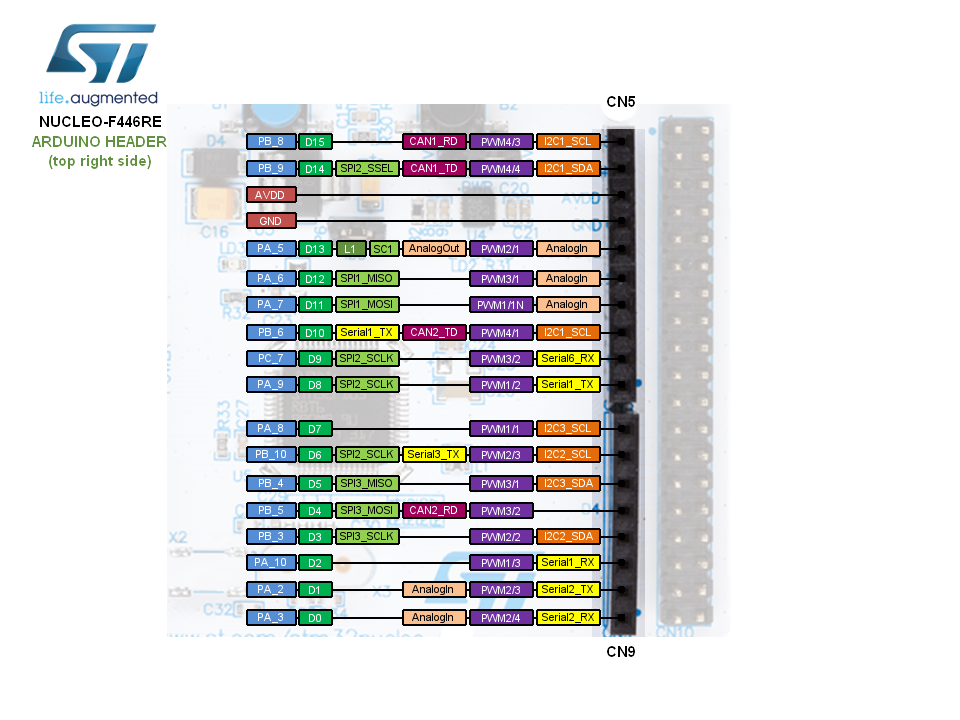
nucleoのパッケージにもあるピンアサイン画像によると、PA5にPWMを出す場合はタイマ2か1らしいです。1は特殊らしいのでまあタイマ2を選んでみます。
{kind=link}
次にマニュアルを確認すると、タイマ2はAPB1に繋がっています。

APB1のクロックは残念ながら最大45MHzなのですが、cubeMXのクロック設定画面でよく見るとAPB1であってもタイマークロックだけは2倍の90Mhzが使われるようです。しかしAPB2なら2倍の90Mhz/180Mhzが使えるのか…まあ後でわかるように今回の場合別のボトルネックがあるので意味ないんですが。

で、cubeMXでTIM2設定のChannnel1をちまちまと入れていきます。下の画像ではプリスケーラPSC=1, カウンタ周期1, パルス幅カウント値1です。それぞれ0が最小なので、これらの意味するところはプリスケーラが2分周、カウンタ周期が0~1の2クロック、パルス幅はそのうちの1クロック、てことでデューティ比50%で最速のPWM(を2分周してるのでその半分速)ということです。






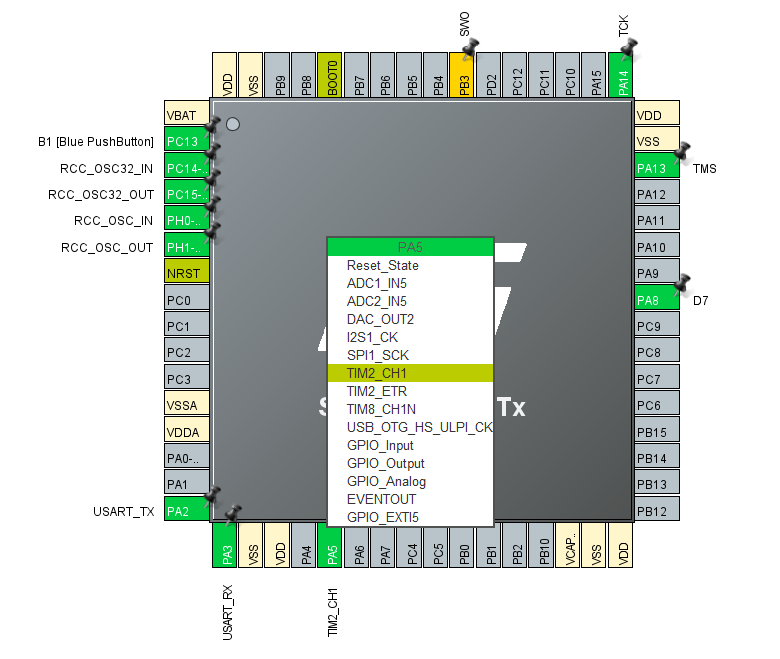
タイマのPWM出力設定を入力して、具体的にどのピンに出すかは同じ入力欄のGPIO Settingsタブでも選べますが、CPUの絵のピン番号のところで左クリックでこうやって選ぶこともできます。
ここでコード生成をするとcubeMXが上記の設定コードを吐いてくれるので、あとはmain関数の中にタイマスタートのHAL関数コールを書くだけで動きます。
if (HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
その結果がこちら。確かに45Mhzで上げ下げして22.5MhzのPWMが出ていますが、残念ながらGPIOモードの時と違ってIOの速度が自動的にLOWにセットされちゃうので立ち上がりが非常にトロいです。

プリスケーラを0にすることで本当の最高速である、90Mhz上げ下げの45Mhz矩形波が出るのですが…

さすがにこれじゃもう波形が出せてるとは言えません。
ピンによって違うかどうかまでは全部試してませんが、数種類のタイマーで試した限り、PWM出力モードの時はどれもピンのIO出力速度がLOWになっていて変更できませんでした。CPU負荷なしで波形が出せるのはいいんですが、ちょっと残念です。
参考:cubeMXが出力したタイマ設定のコード
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 1;
sConfigOC.OCPolarity = TIM_OCPOLARITY_LOW;
sConfigOC.OCFastMode = TIM_OCFAST_ENABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
0 件のコメント:
コメントを投稿